WingtraPilot features a couple of safety parameters to ensure safe operation throughout the entire flight. The parameters allow you to influence the automatically-triggered RTH scenarios described in Return to home.
Check the safety parameters based on the WingtraPilot and WingtraOne versions. Select your WingtraPilot and WingtraOne version:
Safety parameters in 2.7 version and later
The safety parameters are accessible on the top right during mission planning via the drop-down menu below the flight plan information.

The safety parameters are saved to the flight plan. It is important to ensure that they are set correctly according to your flight plan. Keep in mind the following considerations:
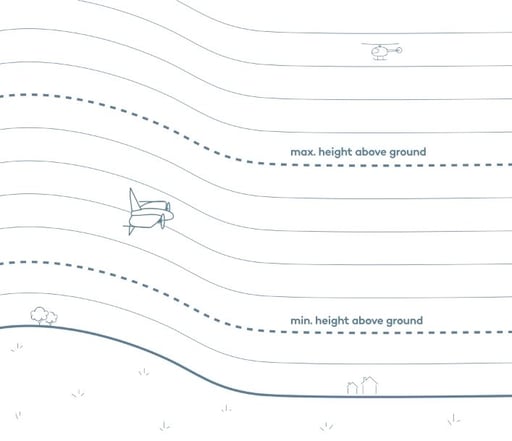
1. Max. height above ground
- Defines the maximum distance between the flight height and the terrain height
- The default value is 200 m
- Set the parameter to have a margin of 60 m at least to the minimum height above ground
- Make sure to align the flight direction with the terrain. You might want to split an area into multiple areas so that you can align better with the terrain. For more information, check out our Terrain following article.
- Increase the maximum height above ground parameter to resolve the conflict
- If the flight plan is too complex, consider splitting it into multiple flight plans
2. Min. height above ground
- Defines the minimum distance between the flight height and the terrain height
- The default value is 60 m
- Set the parameter to have a margin to the highest obstacle in the flight area
- Note: The parameter should account for the uncertainty in the elevation data, which is approximately +- 30 m. As an example, if an object is in your airspace that is 50 m tall, set the parameter to 80 m
- The flight height should always be higher than the min. height above ground. If not, the flight height will be auto-adjusted when uploading the flight plan to not violate the minimum height above ground parameter
3. Connection loss timeout
- Defines the time span after which WingtraOne will execute an RTH if the telemetry connection is lost. If you fly with a remote control (RC), the connection loss timeout indicates the time that WingtraOne will return after both links (telemetry and RC) are lost.
While the drone is controlled with in-app controls (hover), if the telemetry is lost for more than 3s, the plane shall trigger RTH independently of the connection loss timeout parameter.
- Note: since no telemetry connection is available, you will not receive feedback on the state of WingtraOne
- Adapt connection loss timeout to your mission requirements. I.e., in cases of flights beyond visual line of sight and obstacles in the direct line of sight, you may need to increase the timeout time to ensure that WingtraOne follows and completes the defined flight plan
Without telemetry connection you have no means of interacting with your WingtraOne; do not increase connection loss timeout unnecessarily, and make sure not to violate your local law
4. (Optional) return to home (RTH)
Starting with the 2.10 software version, there are two RTH modes available:
- Safe—default mode
- Direct—recommended for advanced users
For more information about the different modes and how to enable the direct RTH, read carefully the Return to home article.
Safe RTH ensures that WingtraOne stays between the minimum and maximum height above ground during mission, RTH and resume. As a consequence, there cannot be a collision with the terrain
The direct RTH guarantees that WingtraOne will always come home on the shortest path. Violation of minimum and maximum height above ground on the RTH and resume path, as well as collision with the terrain, are possible if the RTH height is not set properly.The two modes are available in the Safety parameters section, after the direct RTH mode has been enabled in the Advanced section of the General settings in WingtraPilot. Enabling needs to be done only once per device.

For every flight, select the mode you want to be used for the return to home path. If the direct mode is selected, the minimum RTH height above home parameter will be introduced in the Safety parameters section.
The minimum RTH height above home defines the minimum height at which the drone will come back to home in a straight line. Set the parameter to be higher than all the obstacles in the vicinity of your flight plan.

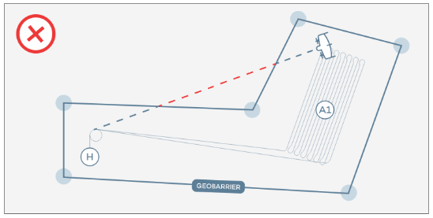
In the case of concave polygon, there may be a risk of violation of the geobarrier if direct RTH is selected, based on the point that RTH will be triggered. You can find more information about the shape of the polygon and how this affects the direct return-to-home path here.
5. (Optional) minimum RTH height above home
- Defines the minimum height, at which WingtraOne returns to home
- If the current height is lower than the defined minimum RTH height, WingtraOne will climb to the set value in a loiter circle and only then will it fly directly home

- Per default, minimum RTH height above home is set to 60 m before each take-off
- Adapt minimum RTH height to the mission requirements—in particular in difficult terrain and when using ground elevation offsets
Geobarrier
The geobarrier defines the maximum allowable distance from home in a particular mission. If the drone crosses the geobarrier, the RTH command is triggered automatically.
There are two types of geobarriers, the circular and the polygonal. You can see the two options, by clicking on the Geobarrier menu on the right side menu (Geofence if you are operating software before 2.10). The default option is the circular geobarrier, which is a circle centered around the home point, and the default radius is 1200 m.

You can switch to the polygonal geobarrier and a rectangle that encloses all flight plan elements will appear. To adjust the geofence shape, move the corners of the polygon. The polygonal geobarrier can also be dragged when it is selected by clicking on the Geobarrier/Geofence label that appears inside the polygon.

The polygonal geofence can be created based on a KML file. For more information read the article KML for flight planning.
Increasing the geobarrier size allows the user to operate WingtraOne beyond visual line of sight (BVLOS). Before changing the geobarrier limits, make sure that WingtraOne will fly safely and within the local legal boundaries.
The geobarrier is part of the flight plan, which means that it is saved along with the rest of the flight plan elements.
The polygonal geobarrier is particularly useful when there are no-fly zones in the surrounding area. It will ensure that even in the event of a safe RTH the drone will stay within the polygonal boundary.
Safety parameters before 2.7 version
The safety parameters are accessible on the top right during mission planning via the drop-down menu below the flight plan information.

Before starting a flight, one can adjust the parameters. These parameters are not saved to the flight plan. They are thus required adaptations after each power cycle / flight, which is especially relevant if your project requires more than one flight. Keep in mind the following considerations:
Geofence radius around home
- Defines the maximum allowable distance from home in the particular mission
- Prevents a fly-away of the WingtraOne beyond this distance
- When creating or opening a flight plan, the maximum default radius is set to 1200 m, which corresponds to the maximum visual line of sight
Geofence height above home
- Defines the maximum allowable height above home in the particular mission
- Prevents a fly-away of the WingtraOne beyond this height
- Per default, the maximum height is set to 400 m before each take-off
Minimum RTH height above home
- Defines the minimum height, at which WingtraOne returns to home
- If current height is lower than the defined minimum RTH height, WingtraOne will climb to the set value in a loiter circle and only then will it fly directly home
- Per default, minimum RTH height above home is set to 60 m before each take-off
- Adapt minimum RTH height to the mission requirements—in particular in difficult terrain and when using ground elevation offsets
Connection loss timeout
- Defines the time span after which WingtraOne will execute an RTH if the telemetry connection is lost. If you fly with a remote control (RC), the connection loss timeout indicates the time that WingtraOne will return after both links (telemetry and RC) are lost.
While the drone is controlled with in-app controls (hover), if the telemetry is lost for more than 3s, the plane shall trigger RTH independently of the connection loss timeout parameter.
- Note: since no telemetry connection is available, you will not receive feedback on the state of WingtraOne
- Per default connection loss timeout is set to 60 seconds before each take-off
- Adapt connection loss timeout to your mission requirements. I.e., in cases of flights beyond visual line of sight and obstacles in the direct line of sight, you may need to increase the timeout time to ensure that WingtraOne follows and completes the defined flight plan
Without telemetry connection you have no means of interacting with your WingtraOne; do not increase connection loss timeout unnecessarily, and make sure not to violate your local law
Minimum ground clearance
- Defines the minimum distance between the flight height and the terrain height
- Use the minimum ground clearance parameter to account for trees, houses and obstacles
- Set the parameter to have a margin to the highest obstacle in the flight area
- Note: The minimum ground clearance parameter accounts for uncertainty in the elevation data, which is approximately +- 30 m. Especially in steep terrain, it is recommended to increase the ground clearance parameter.
- Important: if the minimum ground clearance parameter is higher than the defined height above ground, the flight height will adjusted to match the ground clearance parameter
- Read the article Flight Planning Tools to learn how to optimally use the minimal ground clearance.