RTH is triggered automatically as a failsafe scenario, or it can be triggered manually. Engage RTH if you want WingtraOne to come back and land autonomously.
The path that WingtraOne will follow to return to the home point is defined by the RTH mode selected in the Safety parameters. There are two RTH modes, which are explained in more detail in the sections below.
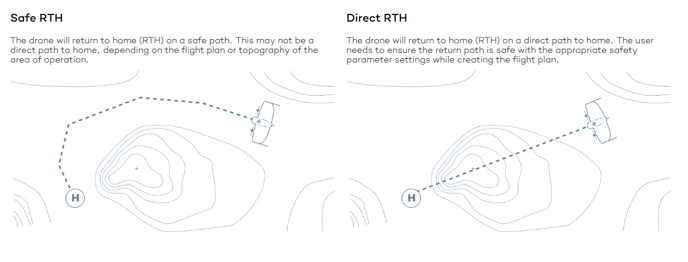
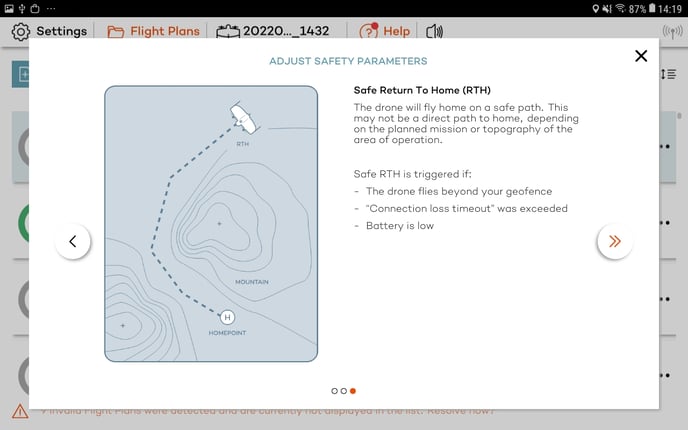
Safe RTH
WingtraOne will fly home on a path that is safe against terrain collision. This is the default mode.
Based on the terrain and your flight plan, WingtraPilot pre-computes a number of safe return-to-home paths before flight. Safe paths include flying back through already completed elements, flying forward towards the end of the planned flight, and available shortcuts within your airspace defined by the geobarrier and minimum and maximum height above ground parameters. In the air, the drone picks the most energy-efficient and safe path depending on the current location, height of the drone and other factors, like wind direction and magnitude.
As soon as RTH is triggered, the RTH path is displayed on WingtraPilot including:
- The RTH point with a loiter circle
- The safe RTH path
- Additional loiter points
More information like altitude changes is displayed in a pop-up. The detailed RTH procedure depending on the position of WingtraOne can be seen in the examples below.
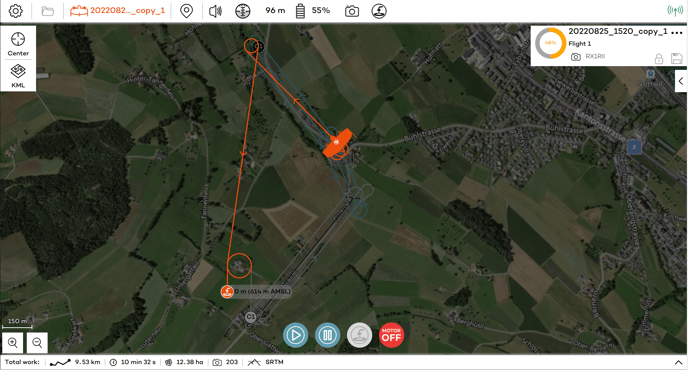
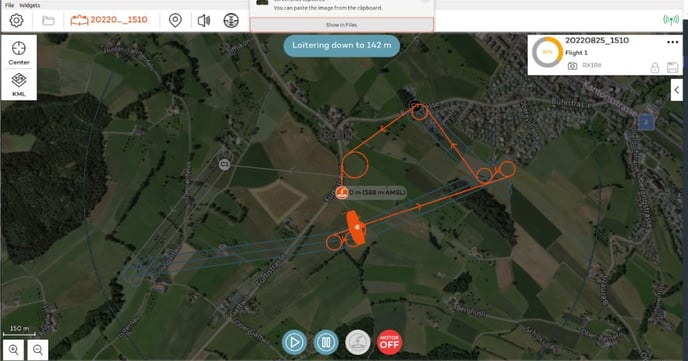

The safe RTH path is not necessarily the shortest route.
In assisted flight mode with the RC, RTH will be performed in a straight line from the point it is triggered to home. The drone will fly straight home at its current altitude as long as that altitude is higher than a minimum of 60m above the home point. Otherwise, the plane will rise first at the RTH point to 60m above the home point and then return straight home.
Direct RTH
Direct RTH is for advanced users only; otherwise, it is strongly recommended to use the default safe RTH. The direct RTH path is not terrain-aware, so it is ultimately the user's responsibility to set it appropriately: i.e., higher than any obstacle between the landing point and all the mission waypoints.
The direct RTH mode has to be enabled in the advanced section of the general settings In WingtraPilot. Enabling needs to be done only once.
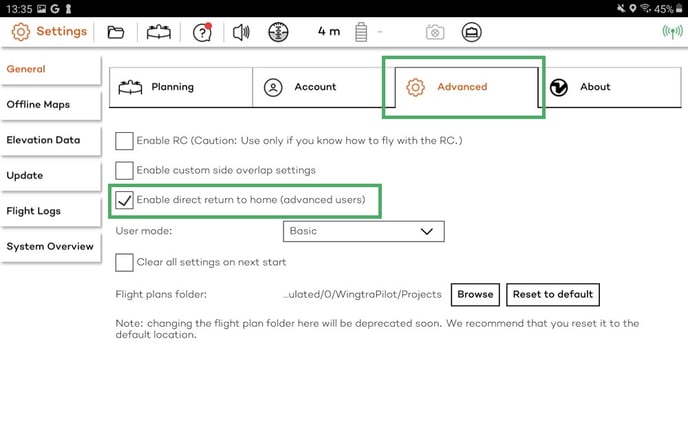 Once enabled, a new safety parameter will be displayed, which allows you to choose the RTH mode: safe (default) or direct.
Once enabled, a new safety parameter will be displayed, which allows you to choose the RTH mode: safe (default) or direct.

When direct RTH mode is selected, WingtraOne will fly home on a straight path from the point of the flight plan where the RTH is triggered. The operator is responsible for ensuring that the return to home path is safe from any point in the flight plan. To do so, the operator will have to set the minimum RTH height above home in order to take into account terrain and local obstacles.
The minimum RTH height above home defines the minimum height at which WingtraOne returns to home. If the flight altitude is below it, WingtraOne will climb to the set value in a loiter circle and only then will it fly directly home. If the flight altitude is above, WingtraOne will fly straight home at the current altitude.
The safest minimum and maximum height above ground cannot be ensured on the RTH path when direct RTH is selected. If your flight requires strict height boundaries, the safe RTH should be chosen, as it ensures staying within the boundaries at all time (mission and RTH path).
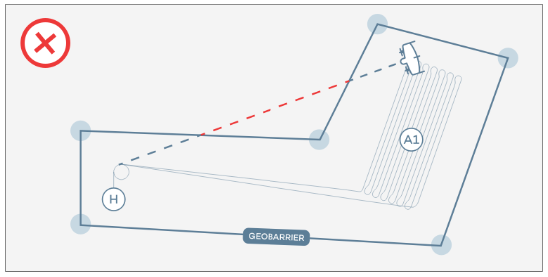
In the case of direct RTH, the geobarrier must be circular or a convex polygon. A polygon is called a convex polygon when the boundaries do not go inside and all the vertices are pointed outside away from the center. The interior angles of a convex polygon are less than 180°. All regular-shaped polygons, i.e., square, triangles, rectangles, are convex.
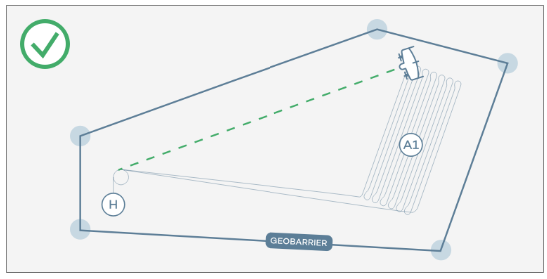
In case of a concave polygon, there may be a risk of breach of the geobarrier if flying straight home, based on the point that RTH will be triggered.