There are several scenarios where WingtraOne will take action by itself and engage a specific failsafe routine during flight.
Warning
Warnings are issued acoustically and visually on the tablet. The mission can still be continued, but caution is advised.
Return-to-home (RTH)
RTH is triggered automatically in these scenarios:
- low battery
- faulty battery
- geofence is violated
- wind speed exceeds 12 m/s for 30 seconds. If the wind speed exceeds the 8 m/s for more than 10 seconds, a warning is issued.
- telemetry connection is lost for longer than the connection loss time
By default, WingtraOne returns after 60 seconds of lost connection but you can adjust this value if needed. If you fly with a remote control (RC), WingtraOne will return 60 seconds after both links are lost and file a warning if only the RC link is lost.
Note: While the drone is controlled with in-app controls (hover), if the telemetry is lost for more than 3s, the plane shall trigger RTH independently of the connection loss timeout parameter. - mission cannot be completed
- actuator failure or other sensor failures
- camera stops being responsive (WingtraOne GEN II only)
The factors that affect the RTH time are: absolute altitude of take-off location, distance to the home position, wind speed, wind direction, transition altitude, and mission design.
RTH can also be triggered manually, see Flight modes and in-flight interactions. More details about the execution can be found in the Return-to-home chapter.
Battery RTH is not triggered automatically when WingtraOne flies in assisted mode. A pop-up message warns the operator that action might be required.
Safety landing / hover down
This is the most extreme failsafe, as it forces WingtraOne to perform a back transition and land from the point the landing is triggered. It is triggered if the position of WingtraOne can not be defined, in the case of GPS loss. In that case, WingtraOne might drift since the position cannot be controlled anymore. If you fly with a remote control (RC), you can still take over manually by switching to assisted mode. If an accurate position estimation can be regained, the emergency landing will be interrupted and RTH will be performed.
In case the battery is at risk of failing, landing on the spot will also be triggered.
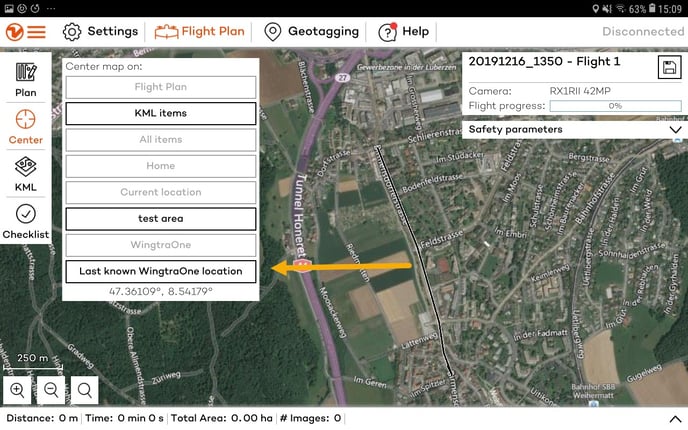
Last known WingtraOne location
The exact GPS coordinates of the last received position of WingtraOne can be displayed at any time. In the event of a crash, you can click on the "Last known WingtraOne location" option on the tablet to check the last known GPS location of WingtraOne.