When planning a flight in WingtraPilot, the first step is to define the home position and its parameters: the transition height and the transition direction.
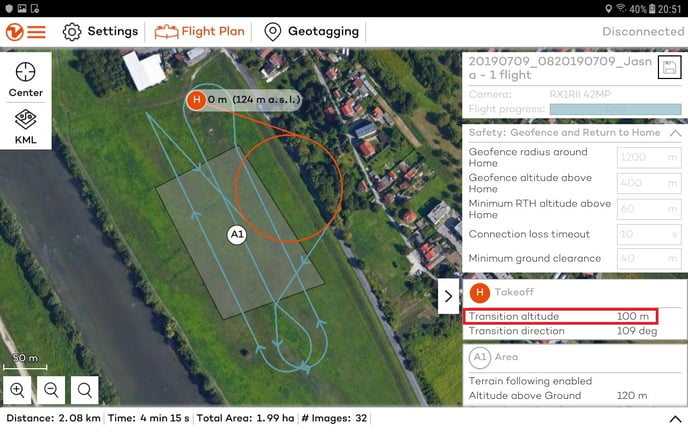
The default transition height is 50m, but it can be adjusted between 20 and 120 m, depending on the environment. When changing these parameters, you should be extra careful and take into account the height of natural or artificial objects in the flight area. The transition height should not be lower than the height of the surrounding objects in the direction that the transition will take place. For example, if you set the home position between buildings, you should determine the height of the tallest building and adjust the transition height such that it is higher than the tallest building by at least 30m.
In hover mode, the drone climbs up using only the power of the motors, while in cruise mode, the drone flies using the thrust force and the power of the motors. The thrust force moves an aircraft through the air by overcoming the drag. Therefore, the battery consumption differs between the two flight modes; in hover, the drone climbs up only if the force of the motors is bigger than the force of gravity; while in cruise the drone has the help of the thrust. For this reason, the battery consumption is 6 to 7 times faster during hover. Consequently, the longer the hover regime in a flight, the earlier the low battery RTH will be triggered.
As a rule of thumb, lowering the transition height by 10 meters increases the cruise flight time by 75 seconds.