Cuando se planifica un vuelo en WingtraPilot, el primer paso es definir la posición de origen y sus parámetros: la altura de transición y la dirección de transición.
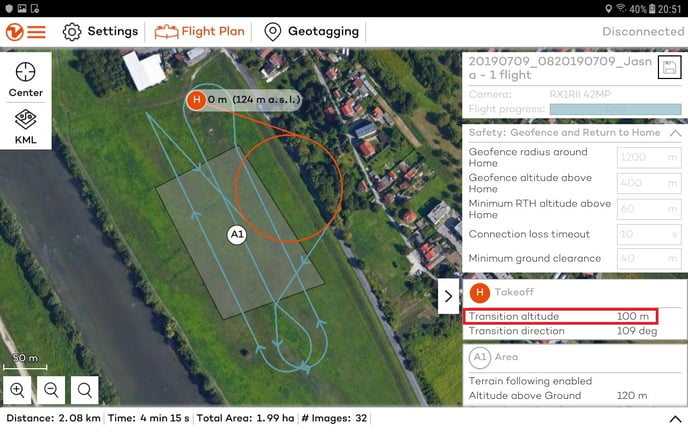
La altura de transición por defecto es de 50 m, pero se puede ajustar entre 20 y 120 m, dependiendo del entorno. Cuando se cambian estos parámetros, se debe ser muy cuidadoso y tener en cuenta la altura de los objetos naturales o artificiales en el área de vuelo. La altura de transición no debe ser inferior a la altura de los objetos circundantes en la dirección en que se realizará la transición. Por ejemplo, si se establece la posición del hogar entre edificios, se debe determinar la altura del edificio más alto y ajustar la altura de transición de tal manera que sea más alta que el edificio más alto por al menos 30m.
En el modo de vuelo estático, el drone asciende usando sólo la potencia de los motores, mientras que en el modo de vuelo crucero, el drone vuela usando la fuerza de sustentación y la potencia de los motores. La fuerza de sustentación mueve una aeronave por el aire superando la resistencia. Por lo tanto, el consumo de la batería difiere entre los dos modos de vuelo; en el modo de vuelo estático, el drone sube sólo si la fuerza de los motores es mayor que la fuerza de gravedad; mientras que en el modo de vuelo crucero el drone tiene la ayuda de la sustentación. Por esta razón, el consumo de la batería es de 6 a 7 veces más rápido durante el modo de vuelo estático. En consecuencia, cuanto más largo sea el tiempo de vuelo de forma estática, antes se activará e RAI por batería baja.
Por regla general, bajar la altura de transición en 10 metros aumenta el tiempo de vuelo de crucero en 75 segundos.