WingtraPilot cuenta con algunos parámetros de seguridad para asegurar una operación segura durante todo el vuelo. Los parámetros le permiten influir en los escenarios de RAI activados automáticamente descritos en el artículo Regreso a Inicio.
Compruebe los parámetros de seguridad en función de las versiones de WingtraPilot y WingtraOne. Seleccione su versión de WingtraPilot y WingtraOne:
- Parámetros de seguridad en la versión 2.7 y posteriores
- Parámetros de seguridad antes de la versión 2.7
Parámetros de seguridad en la versión 2.7 y posteriores
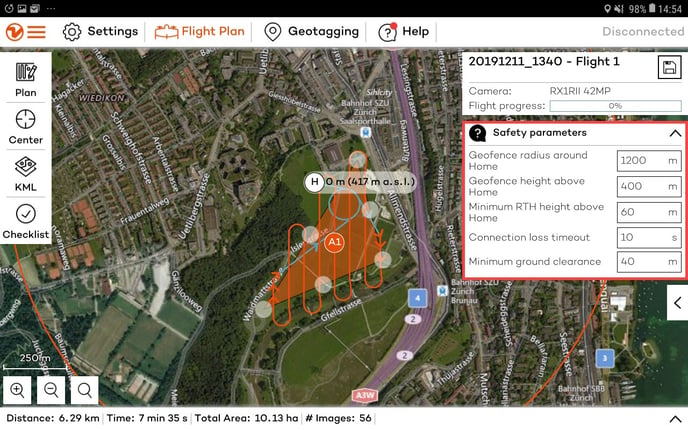
Los parámetros de seguridad son accesibles en la parte superior derecha durante la planificación de la misión a través del menú desplegable situado bajo la información del plan de vuelo.

Los parámetros de seguridad se guardan en el plan de vuelo. Es importante asegurarse de que están configurados correctamente según su plan de vuelo. Tenga en cuenta las siguientes consideraciones:
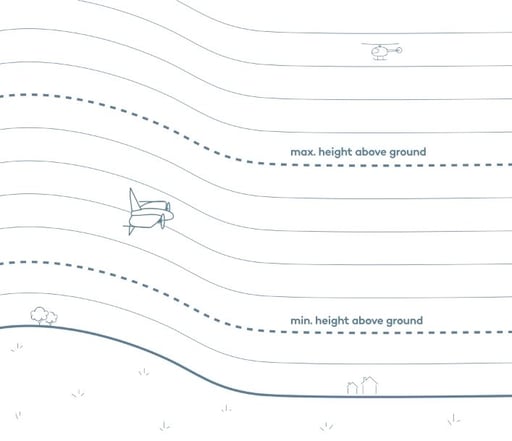
1. Altura máxima sobre el suelo
- Define la distancia máxima entre la altura de vuelo y la altura del terreno
- El valor por defecto es 200 m
- Ajuste el parámetro para tener un margen de 60 m al menos hasta la altura mínima sobre el suelo
- Asegúrate de alinear la dirección de vuelo con el terreno. Es posible que desee dividir un área en varias áreas para que pueda alinearse mejor con el terreno. Para más información, consulta nuestro artículo sobre seguimiento del terreno.
- Aumentar el parámetro de altura máxima sobre el suelo para resolver el problema
- Si el plan de vuelo es demasiado complejo, considere la posibilidad de dividirlo en varios planes de vuelo
2. Altura mínima sobre el suelo
- Define la distancia mínima entre la altura de vuelo y la altura del terreno
- El valor por defecto es 60 m
- Ajuste el parámetro para tener un margen hasta el obstáculo más alto en el área de vuelo
- Nota: El parámetro debe tener en cuenta la incertidumbre en los datos de elevación, que es de aproximadamente +- 30 m. A modo de ejemplo, si en su espacio aéreo hay un objeto de 50 m de altura, establezca el parámetro en 80 m.
- La altura de vuelo debe ser siempre superior a la altura mínima sobre el suelo. Si no es así, la altura de vuelo se ajustará automáticamente al cargar el plan de vuelo para no violar el parámetro de altura mínima sobre el suelo.
3. Tiempo de espera de pérdida de conexión
- Define el intervalo de tiempo tras el cual WingtraOne ejecutará un RAI si se pierde la conexión de telemetría. Si vuela con un control remoto (RC), el tiempo de espera de pérdida de conexión indica el tiempo que WingtraOne volverá después de que se pierdan ambos enlaces (telemetría y RC).
Mientras el drone se controla con controles in-app (hover), si la telemetría se pierde durante más de 3s, el avión activará el RAI independientemente del parámetro de tiempo de espera de pérdida de conexión.
- Nota: al no disponer de conexión de telemetría, no recibirá información sobre el estado de WingtraOne.
- Ajuste el tiempo de espera de pérdida de conexión a los requisitos de su misión. Es decir, en casos de vuelos más allá de la línea de visión visual y obstáculos en la línea de visión directa, puede que necesite aumentar el tiempo de espera para garantizar que WingtraOne sigue y completa el plan de vuelo definido.
Sin conexión de telemetría no tiene ningún medio de interactuar con su WingtraOne; no aumente el tiempo de espera de pérdida de conexión innecesariamente, y asegúrese de no violar su legislación local.
4. (Opcional) retorno a casa (RAI)
A partir de la versión de software 2.10, hay dos modos RAI disponibles:
- Seguro — modo predeterminado
- Directo — recomendado para usuarios avanzados
Para obtener más información sobre los diferentes modos y cómo habilitar el RAI directo, lea atentamente el artículo de Retorno a Inicio.
El RAI seguro garantiza que WingtraOne se mantenga entre la altura mínima y máxima sobre el terreno durante la misión, el RAI y la reanudación. Como consecuencia, no puede haber una colisión con el terreno.
El RAI directo garantiza que WingtraOne siempre volverá a casa por el camino más corto. La violación de la altura mínima y máxima sobre el terreno en la ruta de RAI y reanudación, así como la colisión con el terreno, son posibles si la altura de RAI no se configura correctamente.Los dos modos están disponibles en la sección Parámetros de seguridad, después de que el modo RAI directo haya sido habilitado en la sección Avanzada de la Configuración general en WingtraPilot. La activación solo se debe realizar una vez por dispositivo.

Para cada vuelo, seleccione el modo que desea que se use para la ruta de retorno a casa. Si se selecciona el modo directo, se introducirá el parámetro de altura mínima de RAI sobre el home en la sección Parámetros de seguridad.
La altura mínima de RAI sobre el home define la altura mínima a la que el drone regresará a casa en línea recta. Configure el parámetro para que sea superior a todos los obstáculos en las inmediaciones de su plan de vuelo.

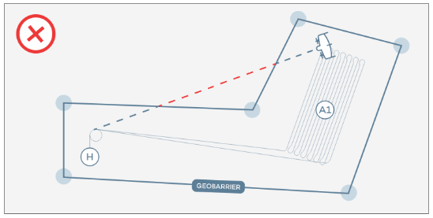
En el caso de un polígono cóncavo, existe el riesgo de violación de la geobarrera si se selecciona el RAI directo, en función del punto en el que se activará el RAI. Puede encontrar más información sobre la forma del polígono y cómo afecta esto a la ruta de retorno directo a casa aquí.
5. (Opcional) altura mínima de RAI sobre el home
- Define la altura mínima a la que el drone WingtraOne regresa a casa.
- Si la altura actual es inferior a la altura mínima de RAI definida, el drone WingtraOne ascenderá al valor establecido en un círculo de espera y solo entonces volará directamente a casa.
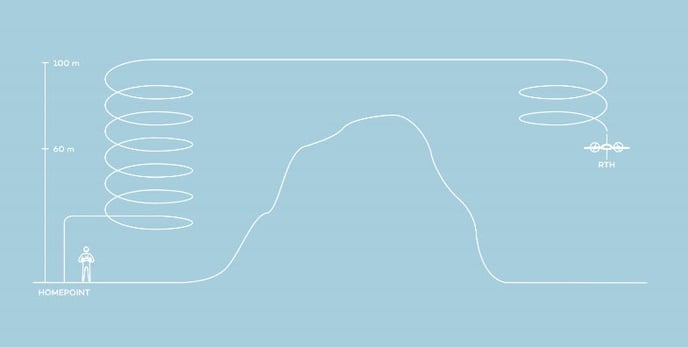
- De forma predeterminada, la altura mínima de RAI sobre el hogar se establece en 60 m antes de cada despegue.
- Adapte la altura mínima de RAI a los requisitos de la misión, en particular en terrenos difíciles y cuando se utilizan compensaciones de elevación del terreno.
Geobarrera
La Geobarrera define la distancia máxima permitida desde el origen en la misión concreta. Si el drone cruza la Geobarrera, se activa automáticamente el comando de regreso a casa.
Hay 2 tipos de geobarrera, la circular y la poligonal. Puede ver las 2 opciones, haciendo click en el menú de Geobarrera en el tamaño de la derecha. La opción por defecto es la geobarrera circular, que es un círculo centrado alrededor del punto de inicio, y el radio por defecto es de 1200 m.

Puede cambiar a la geobarrera poligonal y aparecerá un rectángulo que encierra todos los elementos del plan de vuelo. Para ajustar la forma de la geobarrera, mueva las esquinas del polígono. La geobarrera poligonal también se puede arrastrar cuando está seleccionada, haciendo click en la etiqueta Geobarrera que aparece dentro del polígono.

La geobarrera poligonal puede crearse a partir de un archivo KML. Para más información lea el artículo Usando archivos KML para planificar las misiones.
Aumentar el tamaño de la geobarrera permite al usuario operar WingtraOne más allá de la línea de visión visual (BVLOS). Antes de cambiar los límites de la geobarrera, asegúrese de que WingtraOne volará con seguridad y dentro de los límites legales locales.
La geobarrera forma parte del plan de vuelo, lo que significa que se guarda junto con el resto de elementos del plan de vuelo.
La geobarrera poligonal es especialmente útil cuando hay zonas de exclusión aérea en los alrededores. Garantizará que, incluso en caso de un RAI inteligente, el drone permanezca dentro del límite poligonal.
Parámetros de seguridad antes de la versión 2.7
Los parámetros de seguridad están accesibles en la parte superior derecha durante la planificación de la misión a través del menú desplegable debajo de la información del plan de vuelo.
Antes de iniciar un vuelo, se pueden ajustar los parámetros. Estos parámetros no se guardan en el plan de vuelo. Por lo tanto, son adaptaciones necesarias después de cada ciclo de energía / vuelo, lo cual es especialmente relevante si su proyecto requiere más de un vuelo. Tenga en cuenta las siguientes consideraciones:
Radio de Geobarrera alrededor de inicio
- Defina la distancia máxima permitida desde el punto de inicio en ésta misión en particular
- Evita que el WingtraOne vuele por fuera de esta distancia
- Cuando creando o abriendo una misión de vuelo, el radio de distancia máxima viene por defecto es de 1200 m, que corresponde a la máxima línea de visión
Altura de Geobarrera sobre inicio
- Defina la altura máxima permitida por sobre el punto de inicio en ésta misión en paticular
- Evita que el WingtraOne vuele por encima de la altura definida
- Por defecto, la altura máxima se encuentra definida en 400 metros antes de cada despegue
Altura mínima de RAI sobre el inicio
- Define la altura mínima, a la que WingtraOne regresa al inicio
- Si la altura actual es inferior a la altura mínima definida de RAI, WingtraOne subirá al valor establecido en un círculo de ascenso y sólo entonces volará directamente al inicio
- Por defecto, la altura mínima de RAI sobre el hogar se fija en 60 m antes de cada despegue
- Adapte la altura mínima de RAI a los requisitos de la misión, en particular en terrenos difíciles y cuando se utilicen compensaciones de elevación del terreno
Tiempo de Desconexión
- Define el lapso de tiempo después del cual WingtraOne ejecutará un RAI si se pierde la conexión de la telemetría (o de la telemetría y del Control Remoto si se está utilizando)
- Nota: mientras que no haya conexión de telemetría disponible, no recibirá información sobre el estado de WingtraOne
- Por defecto, el tiempo de pérdida de la conexión se establece en 60 segundos antes de cada despegue
- Adapte el tiempo de pérdida de conexión a los requisitos de su misión. Por ejemplo, en los casos de vuelos más allá de la línea de visión y de obstáculos en la línea de visión directa, puede ser necesario aumentar el tiempo de desconexión para asegurar que WingtraOne siga y complete el plan de vuelo definido
Sin conexión de telemetría no tiene medios para interactuar con su WingtraOne; no aumente el tiempo de pérdida de conexión innecesariamente, y asegúrese de no violar las leyes locales.
Distancia mínima al suelo
- Define la distancia mínima entre la altura de vuelo y la altura del terreno
- Utilizar el parámetro de distancia mínima al suelo para tener en cuenta los árboles, las casas y los obstáculos
- Configure el parámetro para tener un margen hasta el obstáculo más alto en el área de vuelo
- Nota: El parámetro de distancia mínima al suelo tiene una incertidumbre en los datos de elevación, que es de aproximadamente +- 30 m. Especialmente en terrenos inclinados, se recomienda aumentar el parámetro de distancia al suelo.
- Importante: si el parámetro de distancia mínima al suelo es más alto que la altura definida sobre el suelo, la altura de vuelo se ajustará para que coincida con el parámetro de distancia al suelo
- Lea el artículo Herramientas de Planificación de Vuelo para aprender a utilizar de forma óptima la mínima distancia al suelo.