Este artículo consta de las siguientes secciones:
- Crear un plan de vuelo - Parámetros de vuelo
- Limitaciones del sistema
- Configurar la estación base
- Evaluación de la precisión
- Calibración del sensor
- Lista de verificación previa al vuelo
- Después del vuelo
Crear un plan de vuelo - Parámetros de vuelo
En el menú Planes de vuelo de WingtraPilot, cree un nuevo plan de vuelo y seleccione LIDAR de la lista de sensores. Cree el plan, establezca la ubicación de despegue y aterrizaje, y cree un área o corredor como se describe en el artículo: Cree un nuevo plan de vuelo. A continuación se describen los parámetros de vuelo para volar con LIDAR.
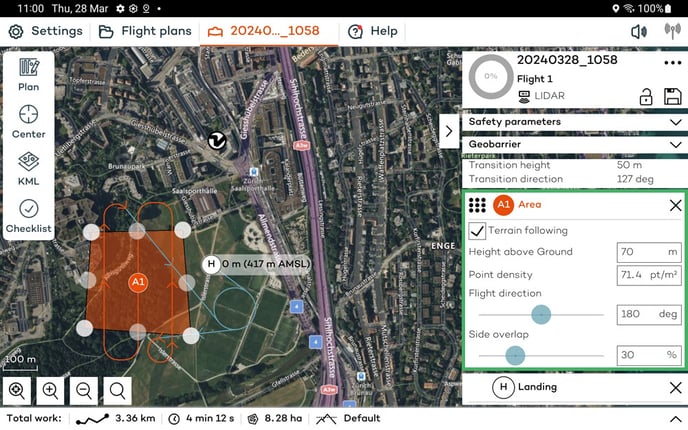
Seguimiento del terreno: Puede definir si el seguimiento del terreno debe habilitarse para cada área. El artículo Seguimiento del terreno explica esta función en detalle.
El sensor Wingtra LIDAR generalmente vuela más bajo que las cámaras RGB para lograr una precisión similar, por lo que se deben tomar precauciones para garantizar que el área esté libre de obstáculos. Se debe habilitar el seguimiento del terreno y, dado que el Wingtra One GEN II vuela a una altura fija sobre el punto más alto de una línea de vuelo, es importante volar perpendicular a la pendiente para capturar una densidad de puntos constante. Para obtener más detalles sobre la planificación de dicha misión, consulte este artículo de la Base de conocimientos sobre Planificación avanzada del vuelo.
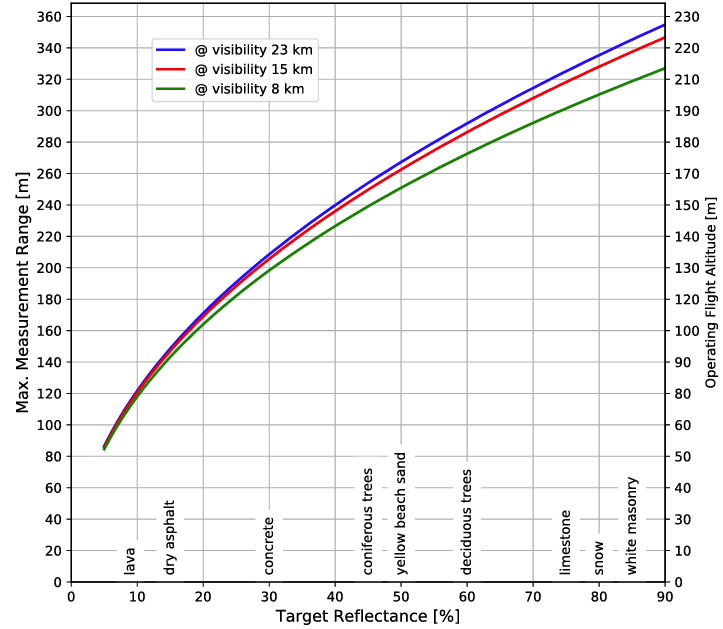
Altura sobre el terreno: Establecer la altura sobre el suelo es un parámetro clave a considerar durante la planificación de la misión debido al alcance del láser y la densidad de puntos. El alcance máximo del escáner es de 300 m, pero a medida que vuela más alto, la probabilidad de detectar un punto en una superficie con baja reflectividad disminuye. El campo de visión (FoV) también se acorta porque en los bordes el pulso del láser necesita viajar más lejos. Cuanto mayor sea la altitud, más puntos se pierden en los lados, lo que reduce el FoV efectivo, por lo que al volar a mayor altura se debe aumentar la superposición para compensar.
| Altitud (m) | Probabilidad de detección (POD) | Medio FoV (grados) |
| 45 | 100% | 45 |
| 60 | 100% | 43 |
| 90 | 96% | 41 |
| 120 | 86% | 34 |
| 150 | 76% | 31 |
En esta tabla, la probabilidad de detección (POD) es una función de la luz ambiental, la distancia del objetivo, la reflectividad de la superficie y el ángulo del rayo con la superficie. Suponiendo que otros factores además de la altura permanezcan constantes, el gráfico muestra que la POD disminuye a medida que aumenta la altura de la superficie.
El rango ideal para alta precisión y detección es entre 60 y 90 m. Para estructuras delgadas como líneas eléctricas, se sugiere volar de 30 a 50 m por encima de la estructura paralela a las líneas. Al mapear la vegetación, la precisión disminuye debido a la menor densidad de puntos del suelo. La altura de vuelo debe establecerse de modo que se ajuste a los objetivos de la misión de precisión y densidad de puntos.
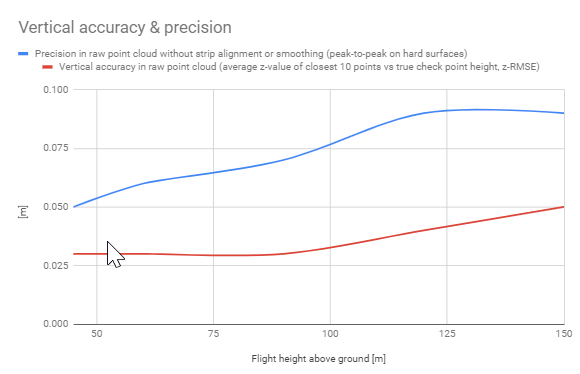
En el cuadro anterior, la línea azul representa la precisión del grosor de la nube de puntos, también conocido como ruido. La línea roja indica la precisión esperada en comparación con un punto de control. Tenga en cuenta este cuadro al establecer la altura de vuelo para cumplir con los objetivos de la misión.
Densidad de puntos: Este es un cálculo promedio de la densidad de las características de los puntos alrededor de cada celda ráster de salida. Wingtra define la densidad de puntos promedio a 45 m AGL (una pasada, un retorno) como 110 pt/m². La densidad de puntos estimada es inversamente proporcional a la altura de vuelo: cuanto más alto se vuela, menor será la densidad de puntos.
La densidad de puntos se calcula en función de varios factores:
- Campo de visión del escáner LIDAR: el campo de visión radial horizontal activo es de 90 grados de 360 grados y el campo de visión vertical es de 40,3 grados
- Altura de vuelo: establecida por el usuario
- Velocidad de vuelo: fijada a 16 m/s
- Velocidad de escaneo LIDAR: 480 000 pts/s para 3 retornos
- Superposición de líneas de vuelo: definida por el usuario, pero predeterminada al 30%
En WingtraPilot la estimación de la densidad de puntos se basa en una sola pasada, por lo que el traslape lateral no se tiene en cuenta. Si se modifica el parámetro de traslape lateral, el valor de la densidad de puntos en la aplicación no cambiará, pero sí lo hará en la vida real.
Dado que la velocidad de vuelo, el campo de visión (FoV) y la frecuencia de escaneo LIDAR son fijos, solo los parámetros de altura de vuelo y traslape en WingtraPilot pueden afectar la densidad de puntos.
El viento y el tipo de superficie también son factores variables en la densidad de puntos, por lo que los valores son estimaciones promedio.
Dirección de vuelo: Define la dirección de vuelo y, en lo que respecta al LIDAR, es importante considerar factores de densidad de puntos con el terreno y el viento. El drone debe mantener una altura constante sobre el suelo y volar perpendicular al viento.
Para mantener la densidad constante, vuele perpendicular al viento para evitar vientos de cola fuertes porque las velocidades más altas reducen la densidad. Para saber cómo planificar el vuelo en condiciones de viento, consulte aquí.
Se debe priorizar el seguimiento del terreno sobre el viento, por lo que si no es posible modificar la dirección, entonces en la dirección paralela aumente el traslape lateral al 50% para mantener una densidad constante siempre que el vuelo tenga una franja a favor del viento y otra en contra adyacentes entre sí.
Superposición lateral: Define el porcentaje de traslape entre líneas de vuelo adyacentes. El traslape predeterminado para LIDAR es del 30%, lo que se sugiere para maximizar la eficiencia y la calidad. Esto es diferente de la fotogrametría, que tiene un traslape del 70% por defecto y también tiene un parámetro de traslape frontal.
Se debe tener en cuenta el alcance de la misión y el entorno al establecer el traslape lateral. Para áreas de vegetación densa y áreas con líneas eléctricas y estructuras delgadas, se recomienda que el traslape se incremente al 55-60% para garantizar la cobertura doble de cada franja de vuelo.
Para capturar detalles de la fachada en estructuras verticales, se recomienda un patrón de trama cruzada ya que el campo de visión horizontal (FoV) es radial, lo que significa que es más ancho, y el ángulo lateral obtendrá más detalles en estructuras verticales. Para crear un patrón de trama cruzada, cree dos áreas una encima de la otra con direcciones de vuelo perpendiculares.
Limitaciones del sistema
Tiempo de vuelo y altitud máxima sobre el nivel del mar (AMSL)
Al ser el sensor LIDAR más pesado que otros sensores de Wingtra, el tiempo de vuelo se reduce a 35 minutos cuando se utiliza el Ultracharge+ y a un poco menos de 30 minutos con el cargador estándar. Este tiempo se ha calculado con los parámetros establecidos por debajo de los 500 m AMSL y una altura de transición de 25 m. Para maximizar el tiempo de vuelo, mantenga la altura de transición lo más baja posible.
Debido al peso adicional, el techo de altitud actual es de 1500 m AMSL. Si la altura máxima excede este valor, aparecerá una advertencia en WingtraPilot.
¡No vuele por encima de los 1500 m con el sensor LIDAR!
Si los vuelos se realizan por encima de los 1500 m, el Wingtra One GEN II se volverá inestable y la garantía no cubrirá los posibles daños.
Longitud de la línea de vuelo
Un factor importante al planificar las líneas de vuelo es asegurarse de que la longitud en línea recta de una sola línea no supere los 4,8 km. Esto se debe a que se introducen errores entre la IMU y el GNSS, que se desvían después de un cierto tiempo. Dado que los aviones de ala fija vuelan más rápido que los drones multirotor, se ven menos afectados, por lo que la longitud de la línea de vuelo es mayor que la de otros drones.
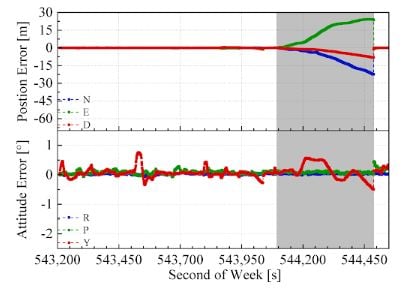
Para volar por un corredor largo y recto, se sugiere dividir la misión en partes más pequeñas, con puntos de espera entre ellas, para mitigar la posibilidad de deriva.
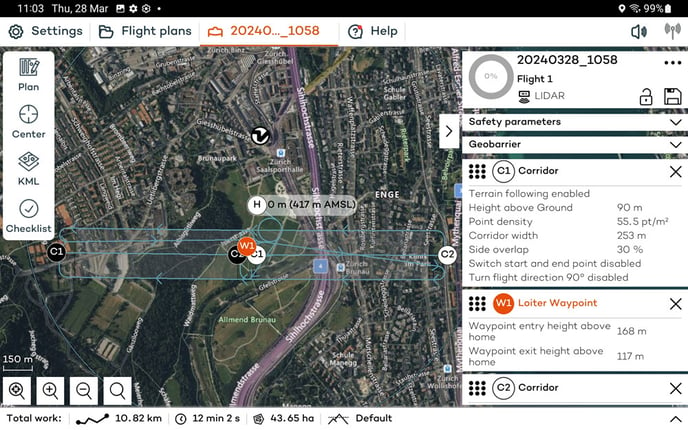
La forma más sencilla de determinar la longitud de la línea de vuelo es importar un archivo KML de polilínea y convertirlo en un área de corredor. Alternativamente, use la barra de escala en la parte inferior izquierda de WingtraPilot. La longitud del corredor también se puede calcular dividiendo la longitud total de la trayectoria del vuelo que se muestra en la sección "Trabajo total" por el número de líneas de vuelo. Por ejemplo, un corredor de 13,5 km con 3 líneas significa que las líneas individuales son de aproximadamente 4,5 km, con un círculo de punto de referencia en el medio.
Reflexividad de la Superficie de los Objetos
Diferentes superficies de objetos tienen distintas tasas de reflexividad. Al considerar la densidad de puntos, es importante saber cómo la superficie refleja el pulso láser. La mayoría de las superficies de objetos tienen una reflexividad del 10%.
El agua es un fuerte absorbente, y un láser LIDAR típico con una longitud de onda de 905nm será absorbido directamente. A menos que el LIDAR sea del tipo batimétrico y la longitud de onda del láser sea más corta, no penetrará el agua.
Aquí hay algunos ejemplos de tasas promedio de reflexividad de superficie a 905 nm:
- Asfalto fresco: 4-7%
- Hierba seca: 15-20%
- Canopeo forestal: 5-20%
- Concreto húmedo: 30-50%
- Nieve: 60-90%
Dado el mismo material, los objetos blancos tienen una mayor reflexividad que los objetos negros, los objetos lisos tienen una mayor reflexividad que los objetos ásperos, y los objetos con mayor reflexividad son más fáciles de percibir.
El negro puede absorber el pulso láser, y la humedad en las superficies del pavimento oscuro puede causar problemas. Volar más bajo ayuda con la intensidad del retorno para ser captado. Si volar más bajo no es posible, esperar a condiciones más secas. Cuantos más puntos se pierdan, menor será la densidad de puntos, así que si las condiciones ambientales no son favorables, aumentar la superposición y volar más bajo.
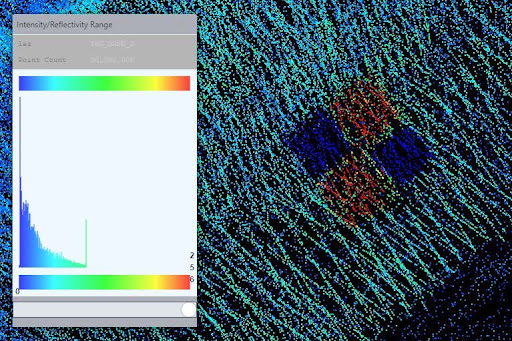
La intensidad es una medida relativa de la fuerza de retorno del pulso láser que generó el punto. Se basa en gran medida en la reflexividad de la superficie del objeto medido, así como en las condiciones atmosféricas, la divergencia del haz láser y el ángulo de incidencia del láser. La intensidad ayuda en la detección de características y extracción en la clasificación LIDAR, pero el usuario debe ser consciente de que la humedad en la columna de aire, así como un cambio en la reflectancia del objeto medido (como estar mojado, o visto desde un ángulo de incidencia diferente), resultará en valores de intensidad diferentes entre sucesivas colecciones lidar de la misma escena.
Configurar la estación base
Wingtra utiliza un flujo de trabajo solo PPK para LIDAR y requiere archivos GNSS capturados desde una estación base. Las correcciones PPK son un paso clave en el proceso LIDAR ya que se requiere una mayor precisión en comparación con el procesamiento fotogramétrico, ya que LIDAR es una medición directa.
Por favor, sigue nuestro artículo de Mejores Prácticas de la Estación Base. Habilita todas las constelaciones disponibles (GPS, GLONASS, Beidou, Galileo) y anota con precisión la altura del poste y el desplazamiento ARP-APC. Con LIDAR, es importante usar una estación base de alta calidad con configuraciones optimizadas y un registro interno de 1 segundo.
La estación base y el módulo PPK en el dron (rover) reciben y registran observaciones GNSS. Estas observaciones (combinadas con datos IMU precisos en el LIDAR) pueden fusionarse en el paso de procesamiento PPK para crear una trayectoria altamente precisa.
La configuración recomendada de la estación base para LIDAR es configurar un receptor local sobre un punto con coordenadas conocidas.
La altura mal medida de la antena sobre la marca es probablemente el error más generalizado y frecuente en la topografía de control GPS.
Para una precisión absoluta de grado topográfico, usa una estación base de un fabricante confiable que esté lo más cerca posible del área de mapeo, preferiblemente dentro de ella.
Comienza a registrar al menos 5 minutos antes del despegue y detente 5 minutos después del aterrizaje. Para incluir todas las constelaciones GNSS y todos los satélites visibles, exporta a una versión de RINEX > 3.0. La versión 2.11 puede funcionar para procesar datos, pero no se sugiere porque solo incluye GPS+GLONASS.
Después de la exportación desde la estación base, asegúrate de que todos los archivos RINEX se transfieran al portátil, no solo el archivo de observación (.o). Se recomienda encarecidamente no cambiar el nombre de los archivos RINEX ni hacer otras modificaciones. Se recomienda exportar un informe de la ubicación de la estación base y asegurarse de que las coordenadas estén en un formato de datum geodésico.
Evaluación de la precisión
Se requieren puntos de control para realizar una evaluación de precisión de la nube de puntos. Los puntos de control son mediciones de terreno imparciales dentro del área de mapeo. La evaluación puede ocurrir en software de terceros, pero deberían capturarse en el conjunto de datos.
Para evitar errores y desfases porque los puntos de control están desviados, asegúrate de definir las coordenadas de acuerdo con los estándares de topografía - se recomienda usar rovers RTK conectados a la misma base de donde provino el RINEX. La alternativa es conectar el rover RTK a una red local CORS/VRS para establecer los puntos de control pero asegurarse de que se use la misma estación para procesar los datos LIDAR.
La verificación de precisión vertical es sencilla y automática. El software compara la altura del punto de control con el promedio de los puntos LIDAR que lo rodean.
Por otro lado, las verificaciones de precisión horizontal pueden ser más desafiantes debido a la densidad de puntos lidar y la falta de comparación superficie-punto. La mejor opción es usar objetivos reflectantes especiales que sean visibles en una nube de puntos. Idealmente, el objetivo debería ser un tablero de ajedrez o patrón de chevrón grande con colores altamente contrastantes como negro/blanco. Coloca los objetivos en una superficie plana y evita objetos elevados como esquinas de edificios e hidrantes.
Si faltan tales marcadores, la señalización horizontal de tráfico, por ejemplo, las rayas de estacionamiento, tiende a destacarse bien en mapas de intensidad debido a materiales termoplásticos retroreflectantes.
Calibración del sensor
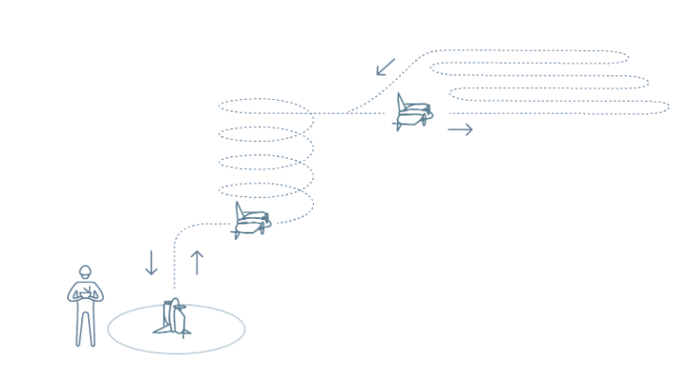
La mayoría de las cargas útiles LIDAR en el mercado requieren una calibración antes de volar la misión. Por ejemplo, se necesita volar un patrón de figura 8 antes de la misión, y en caso de una línea larga un patrón para calibrar en vuelo. El LIDAR Wingtra no necesita procedimientos de calibración extra ya que ocurre automáticamente durante el despegue, la transición y el ascenso a la misión. El patrón de vuelo en los giros también actúa como un bucle de calibración entre franjas ayudando a que los datos mantengan una alineación y consistencia suaves.
Lista de verificación previa al vuelo
La lista de verificación previa al vuelo se explica aquí. En su mayor parte, es el mismo flujo de trabajo que otras cargas útiles además de ensamblar la antena, colocar la cubierta superior en el dron y presionar el botón de encendido en la carga útil LIDAR para encenderla. Las diferencias de la lista de verificación en comparación con otras cargas útiles están en:
paso 8 - el sensor de mapeo pasará por una secuencia de inicio y verificación de salud para asegurar que todo esté configurado correctamente.
paso 14 - un comando comenzará a registrar datos en el escáner. El sistema asegurará que haya suficientes señales GNSS disponibles, suficiente espacio USB disponible en la unidad y se enactorá un retraso de 30 segundos para la calibración INS.
Asegúrate de que el láser esté limpio antes del vuelo. Limpia con un paño de microfibra o limpiador de vidrios. Cuidado con las huellas dactilares, manchas o suciedad en el sensor.
Una vez que todos los pasos estén en verde, procede al despegue.
Después del vuelo
Después del vuelo, un mensaje indica el éxito de la recolección y organización de datos, como con todas las otras cargas útiles. El sistema verificará para asegurarse de que todos los datos se hayan guardado. Luego, las baterías pueden desconectarse para apagar el dron y la carga útil.
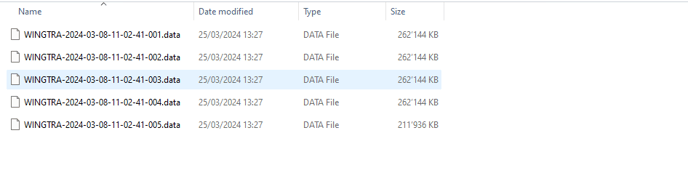
Para verificar la sanidad de los datos, retira la unidad USB de la carga útil e insértala en una computadora. El nombre de la carpeta debe coincidir con el plan de vuelo. Los archivos en la carpeta del proyecto deberían verse como a continuación:
 Open the data folder to verify that it contains files.
Open the data folder to verify that it contains files.
 Después del vuelo, también asegúrate de que la estación base estaba registrando datos durante todo el vuelo.
Después del vuelo, también asegúrate de que la estación base estaba registrando datos durante todo el vuelo.