La lista de verificación difiere ligeramente según la cámara con la que se vuele. Haz clic aquí para ver las verificaciones previas al vuelo específicas de RedEdge MX y aquí para las verificaciones previas al vuelo específicas de Altum.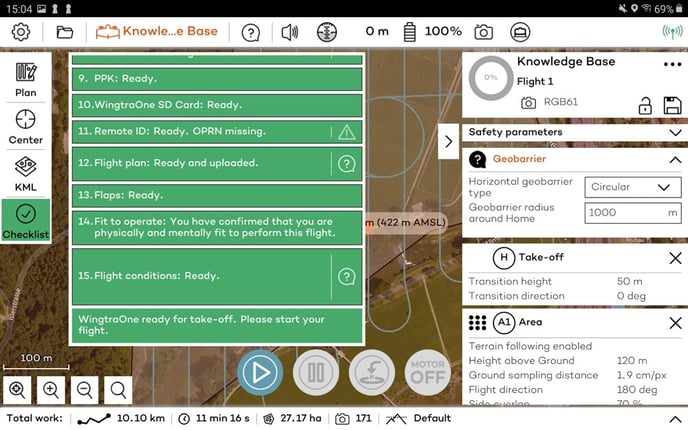
Como operador, debe revisar la lista de verificación previa al vuelo dentro de WingtraPilot antes de poder comenzar el vuelo. Para los pasos con el icono del signo de interrogación puede encontrar diapositivas de ayuda que le guiarán sobre cómo utilizar el drone. Si alguna de las verificaciones previas al vuelo falla (p. ej., fallo del sensor), la verificación previa al vuelo correspondiente se pone en rojo y no es posible iniciar el vuelo. A continuación encontrará una explicación de cada punto de control en la lista de verificación de previa al vuelo y consejos para la solución de problemas si falla un control.
1. Altura sobre el suelo: El plan de vuelo respeta la altura mínima sobre el suelo de 60 m y la altura máxima sobre el suelo de 200 m (excluyendo el despegue y el aterrizaje).
Este punto de la lista de comprobación es una prueba automática. Garantiza la seguridad del plan de vuelo. Tan pronto como hayas añadido una posición de origen y un área de vuelo, la altura de vuelo se comprobará automáticamente para garantizar que la trayectoria de vuelo está siempre entre las alturas mínima y máxima sobre el suelo. Para modificar los parámetros de altura mínima y máxima sobre el suelo, marque la casilla de parámetros de seguridad en el lado derecho. La distancia al suelo de la trayectoria de despegue y aterrizaje se comprobará al cargar el plan de vuelo, para una descripción más detallada, consulte las herramientas de planificación de vuelo.
Note: This pre-flight check is only available if elevation data is enabled. Check WingtraPilot settings to activate the use of elevation data.
2. Comprobación de los componentes. ¿Está limpio el sensor de distancia? ¿Están las hélices en buen estado y bien sujetas? ¿Se ha quitado la tapa de la cámara?
Compruebe si el sensor de distancia está polvoriento o bloqueado por algo (nieve, cinta adhesiva, etc.). El sensor de distancia está situado en la cola del WingtraOne, junto al soporte central. Si no está limpio o si no está seguro de que lo esté, tómese su tiempo para limpiarlo con un paño limpio.
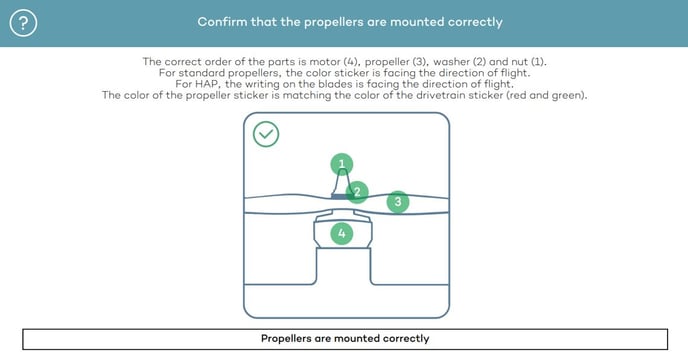
Compruebe visualmente que las hélices no estén dañadas y que estén bien sujetas. Intente desenroscar la hélice con la mano: sujete el motor con una mano y la hélice con la otra e intente abrirla: la hélice roja tiene una rosca normal para la mano derecha, la hélice verde tiene una rosca para la mano izquierda. Si la hélice se desenrosca a mano, aprieta la tuerca con el torx o la herramienta de llave hexagonal tanto como puedas. Consulte el artículo de mantenimiento para saber cómo sustituir una hélice si está dañada.
En la imagen de más abajo puedes ver el orden correcto del motor, la hélice, la arandela y la tuerca. En caso de haber tenido un vuelco, la ventana de abajo aparecerá, al hacer click en la comprobación de los componentes, en el siguiente vuelo después del incidente.
Retire la tapa de protección de la cámara. Recomendamos guardarla en la caja del piloto de inmediato, ya que es fácil de perder.
Confirme haciendo click en el punto de la lista de comprobación. No vuele si alguna parte del WingtraOne está dañada.
3. Conecte la telemetría a la tablet y encienda el WingtraOne
Este punto de la verificación previa al vuelo es una prueba automatizada. Conecta la telemetría a la tablet a la derecha del botón de inicio. WingtraPilot se conecta automáticamente al WingtraOne tan pronto como la telemetría se conecta a la tablet y WingtraOne se enciende. Si no se puede establecer una conexión automática, se puede conectar manualmente en la pestaña de configuración haciendo clic en el botón "Telemetría" del lado izquierdo. En la parte inferior, haga clic en "Añadir". Seleccione el tipo "Serial" y la velocidad en baudios "57600" y haga clic en "ok". Si aún no puede conectarse, reinicie la tablet y asegúrese de que ha conectado la telemetría y encendido el WingtraOne.
4. Compruebe el voltaje de las baterías
Esta es una prueba automatizada. WingtraPilot comprueba si el voltaje de las baterías está por encima de los 30V. Si el voltaje es inferior a 30V, se impide el despegue y hay que cambiar las baterías. En los siguientes casos de fallo de batería, WingtraOne rechazará el despegue cuando intente iniciar el vuelo:
- Batería demasiado caliente (>40°C)
- Batería demasiado fría (<10°C)
- Las baterías no se encuentran cargadas uniformemente
5. Comprobar la superficie de despegue
Esta es una prueba automatizada. WingtraPilot comprueba si WingtraOne está sobre un terreno plano. Mueve WingtraOne si la comprobación está en rojo. Si WingtraOne está nivelado y el control permanece en rojo, vuelva a encenderlo. La pendiente máxima aceptada es de 10 grados (17.6%).
Además de un lugar de despegue parejo, asegúrese de que el terreno no esté húmedo y embarrado, lo que causaría que el soporte central o el drone se atasque, lo que podría causar que se volcara al despegar.
6. Configuración de la intervención en el aterrizaje: Listo con los controles in-app
Esto es un control automático. WingtraOne sólo puede ser controlado con los botones de control in-app. Si usted a usado el Control Remoto en el pasado, la recomendación de deshabilitarlo va a aparecer en este punto.
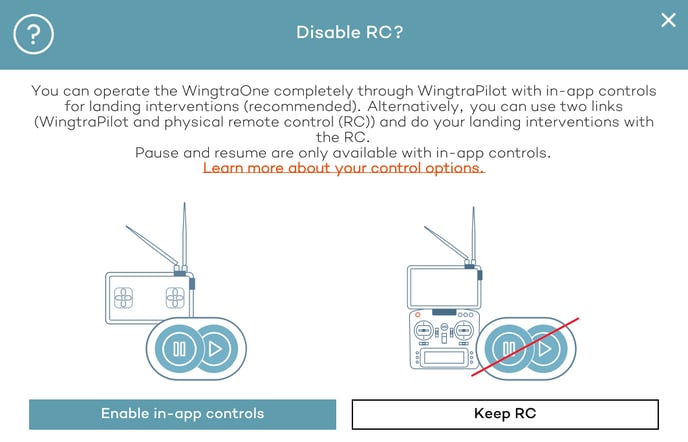
No se recomienda volar con el RC. Sin embargo, en caso de que decida utilizarlo, encienda el RC mediante el botón de encendido/apagado en el centro de la unidad. Después de encenderlo, se conecta automáticamente a WingtraOne.
7. Comprobar las señales de GPS
Esta es una prueba automatizada. Dependiendo del clima y de la ubicación, puede suceder que su WingtraOne no reciba el bloqueo del GPS por varios minutos. Si no se puede establecer el bloqueo del GPS después de más de cinco minutos, intente volver a encender el WingtraOne. Si sigue sin recibir la señal, envíe una solicitud de asistencia.
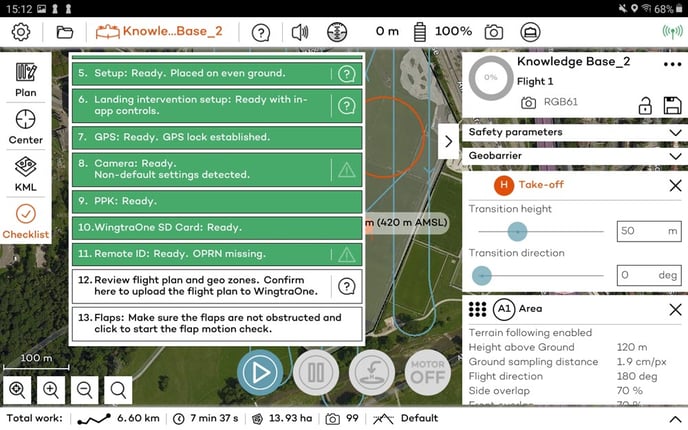
8. Preparación de la cámara
Esta comprobación comprobará la conectividad de la cámara, así como la salud de la montura de la cámara y la capacidad de la tarjeta SD para almacenar la imagen y los datos de vuelo. La comprobación se realiza automáticamente inmediatamente después de conectar las baterías de vuelo en el WingtraOne. El punto de control se vuelve naranja para indicar que el proceso de prueba de la cámara está en curso. Una vez que la prueba ha finalizado con éxito, la casilla de verificación de la cámara se vuelve verde.
Si la comprobación falla, haga clic en el triángulo con el signo de exclamación para ver más detalles sobre el problema y la posible solución. Una vez resuelto el problema, haz clic en el elemento de la lista de comprobación para repetir la comprobación.

Específico de las cámaras RX1
En el caso de las cámaras RX1, también se comprueban los ajustes de la cámara. En caso de que los ajustes sean diferentes de los valores predeterminados y recomendados, el botón muestra un mensaje de configuración no predeterminada. Si hace clic en el triángulo, verá los ajustes que se han cambiado. Incluso con la configuración no predeterminada de la cámara, la comprobación previa al vuelo se vuelve verde y puedes realizar el vuelo.

Se comprueban los siguientes ajustes:
- Apertura: advertencia activada si el valor no es 4.5
- Fuente de luz: advertencia activada si el balance de blancos no está ajustado a Auto
- Modo de programa de la cámara: advertencia activada si el dial de modo no está en 2
- Modo de medición: se dispara una advertencia si no está configurado en multisegmento
- Dial: se activa la advertencia si se selecciona RAW+JPEG
9. Conexión PPK
Este chequeo probará la conectividad PPK y comenzará a configurar el dispositivo para la recolección de datos. También se inicia automáticamente después de que las baterías de vuelo se conecten al drone. Si no tiene un módulo PPK instalado, el botón se volverá verde y se mostrará un mensaje que indica que el módulo PPK no está conectado.
Si la comprobación falla, el botón se volverá rojo y la razón del fallo se mostrará en el elemento. Haga clic en el triángulo con el signo de exclamación para ver más detalles sobre el problema y revisar las instrucciones de solución de problemas. Tenga en cuenta que para repetir la comprobación PPK necesita reiniciar WingtraOne.
Siempre puede evitar una comprobación PPK fallida haciendo clic en la ventana de resolución de problemas y seleccionando que desea proceder sin PPK. Esto hará que el botón se ponga verde, pero se recogerán datos incorrectos o sin PPK.
10. Comprobación de la tarjeta SD WingtraOne
Para los drones WingtraOne GEN II, esta comprobación verificará que la tarjeta SD WingtraOne está insertada y lista. Esto es necesario para que los drones WingtraOne GEN II puedan volar.

En caso de que esta comprobación falle, consulte las instrucciones de solución de problemas en el artículo de la base de conocimientos.
11. Remote ID
A partir de la actualización de software 2.7, la preparación del remote ID forma parte de la lista de comprobación previa al vuelo.
Para más información sobre el ID remoto, consulte el artículo correspondiente.
12. Revise el plan de vuelo y cárguelo en WingtraOne
Una vez que haya planeado su vuelo, asegúrese de revisarlo siempre cerrando la verificación previa al vuelo y comprobando los parámetros y la ruta de vuelo planeada. Asegúrese de que WingtraOne no colisionará con ningún obstáculo. El gráfico de altitud le permite revisar las altitudes de vuelo correctamente. Nota: tener los datos del terreno activados (consulte la verificación 1) ayuda a establecer correctamente las altitudes de vuelo. Tenga mucho cuidado con la dirección de transición y la altitud, así como con la altitud del círculo de ascenso/descenso.
Haga clic en este punto de verificación en la lista de verificación previa al vuelo para cargar el plan de vuelo en WingtraOne. WingtraPilot guarda el plan de vuelo automáticamente cuando lo carga haciendo clic en el punto de control. En caso de que realice algún cambio después de cargar el plan de vuelo, WingtraPilot le pedirá que lo cargue de nuevo, lo cual puede hacerse pulsando de nuevo el punto de control. Si la posición del GPS se desvía más de 2 metros entre la carga del plan de vuelo y el despegue, el control se vuelve a poner en blanco y tiene que volver a cargarlo.
Al mismo tiempo, se realizan más comprobaciones de calidad del plan de vuelo, y se emite un aviso si no se cumplen:
- Plan de vuelo inviable: en caso de que el primer elemento del plan de vuelo después del despegue o el último elemento del plan de vuelo antes del aterrizaje se encuentre por debajo de la altitud de transición, su plan de vuelo será rechazado.
- WingtraPilot le dará la opción de insertar automáticamente un punto de ruta de transición en el lugar correspondiente; se recomienda insertar el punto de ruta y ajustarlo manualmente (muévalo a un lugar seguro y ajuste la altitud de entrada/salida del punto de ruta a un valor seguro)
- WingtraOne comprueba que el almacenamiento de la tarjeta SD de la cámara es demasiado bajo para almacenar el número calculado de imágenes para el plan de vuelo cargado. Si este es el caso, despeje más espacio en la tarjeta SD para asegurarse de que se guarden todas las imágenes. Si ignora la advertencia y continúa la carga de la misión, tenga en cuenta que podría perder algunas imágenes hacia el final de la misión
- La altitud de transición segura comprueba si se cumple la distancia mínima al suelo para el despegue y el aterrizaje. En caso de que sepa que la altitud de transición que ha establecido es segura, puede continuar según lo previsto; recomendamos aceptar la altitud de transición sugerida haciendo clic en "Sí" durante esta comprobación
- Violación de la geobarrera: tanto el radio de la geobarrera horizontal como la altitud de la geobarrera vertical se comprueban para ver si son compatibles con la misión definida. Si es necesario, se puede aumentar el parámetro de la geobarrera en el submenu de seguridad de la derecha
- Confirmación de que las hélices están montadas correctamente: en caso de que se haya detectado un cambio de hélice, al cargar el plan de vuelo aparecerá una ventana con las instrucciones sobre cómo deben montarse correctamente las hélices
13. Asegúrate de que los alerones no estén obstruidos y haz clic para iniciar la comprobación del movimiento de los mismos.
En este punto, WingtraOne ejecuta una rutina (ver vídeo) que comprueba la funcionalidad de ambos alerones y servos moviendo los alerones de un lado a otro.
A partir de la versión 1.13, en lugar de confirmar visualmente la integridad del movimiento de los alerones, el WingtraOne realiza una comprobación de autodiagnóstico, diseñada para detectar una serie de posibles casos de daños en los colgajos y servos.
Una vez completada la rutina de los alerones, el punto de verificación se pone en verde si no se ha detectado ningún problema. Si se detecta un problema, la verificación fallará (punto de verificación rojo). Puede repetir la prueba una vez más en caso de fallo, pulsando el botón de comprobación de los alerones en WingtraPilot.
NO VUELE si la comprobación falla dos veces y póngase en contacto con el Soporte de Wingtra.
Aplicar tensión a los alerones en el suelo durante largos períodos de tiempo, por ejemplo, un obstáculo de bloqueo en el suelo, puede llevar a que los componentes fallen. Por lo tanto, se recomienda:
- asegurarse de que el aleron se encuentre libre de obstáculos, siempre que el drone esté activado.
- evitar, si es posible, el despegue con pastos altos y densos o desde los arbustos.
- no dejar el drone encendido durante largos períodos de tiempo si no es necesario.
14. Compruebe que no haya personas en un radio de cinco metros alrededor del drone y que las condiciones ambientales y el espacio aéreo sean adecuados para volar
Comprueba si las condiciones ambientales son adecuadas para volar. También compruebe que su vuelo no viola las leyes. Asegúrese de que no haya gente cerca de WingtraOne. En caso de viento, le aconsejamos que esté a más de cinco metros de WingtraOne durante el despegue y el aterrizaje. Además, tenga en cuenta que el GPS es menos preciso en el caso de objetos altos circundantes (por ejemplo, edificios, árboles). Esto puede llevar a la deriva de WingtraOne y a un aterrizaje inexacto. Por lo tanto, manténgase a una mayor distancia de los objetos altos. Confirme presionando este punto de control en la lista de control.
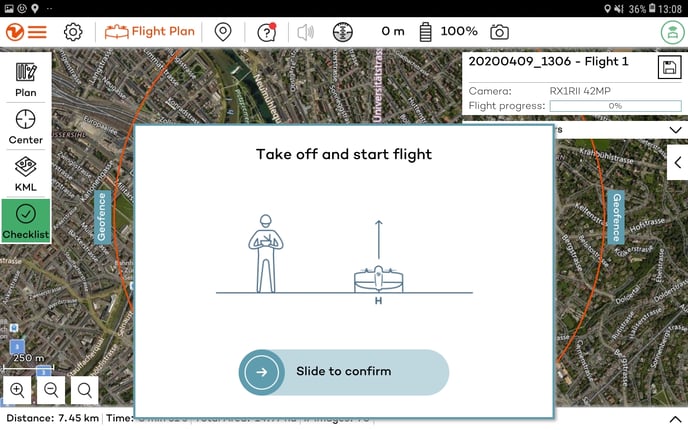
15. Complete todos los pasos anteriores y vuele el WingtraOne
Para iniciar el vuelo, haga clic en "Comenzar vuelo" y mueva el deslizador de izquierda a derecha como se muestra en las imágenes de abajo. El botón de "listo para volar" se volverá verde sólido (-------) una vez que WingtraOne empiece a volar.
Comprobación de motor previo al vuelo
Antes de iniciar el vuelo, se realiza una comprobación automática que hace girar los motores por separado (véase el vídeo a continuación) para asegurarse de que ambos funcionan correctamente y que ambos consumen la misma cantidad de corriente. En caso de que esta comprobación falle, se impedirá el despegue. En tal caso, compruebe nuestra lista de errores para obtener instrucciones sobre cómo reaccionar.