WingtraOne can be fully controlled with just the tablet as a ground station. Therefore, as of the 1.12 version, we highly recommend operating WingtraOne without using the remote control (RC).
In-app controls allow you to pause the flight in cruise, set the WingtraOne in a loiter circle and resume the data collection from pause or return-to-home (RTH).
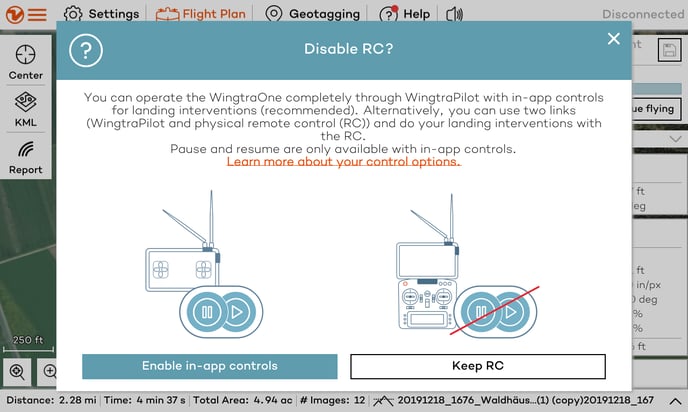
To enable the pause and resume feature, you need to disable the RC functionality. You can do this from the General settings or during the pre-flight check. By default, the RC functionality will be disabled.
When is this feature helpful?
Unexpected circumstances can occur while you are flying your WingtraOne. For example, a helicopter or another drone can enter the airspace; birds might fly too close; you become unsure if the full flight has been planned safely and want to review it while it's in progress, etc. In these and related cases, you can pause the flight when you need, and resume it from the point where you paused. When you pause a flight, WingtraOne immediately enters into a loiter circle.
How to use the pause and resume functionality
You can find the necessary guidelines in the following video.
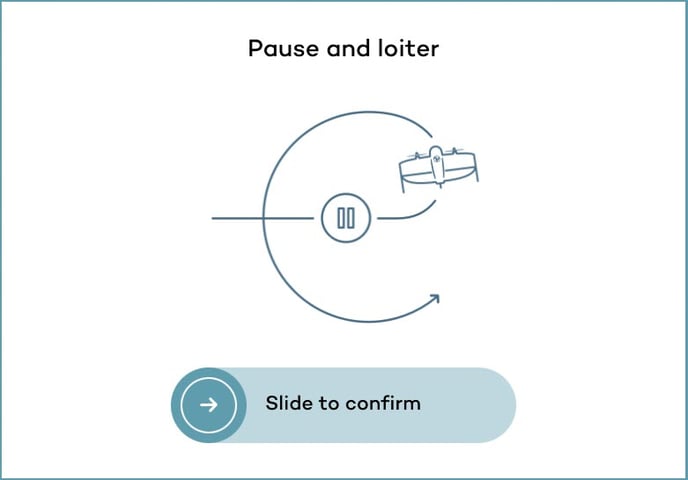
1. Click on the Pause and loiter button and slide to the right, at which point WingtraOne will immediately enter a loiter circle
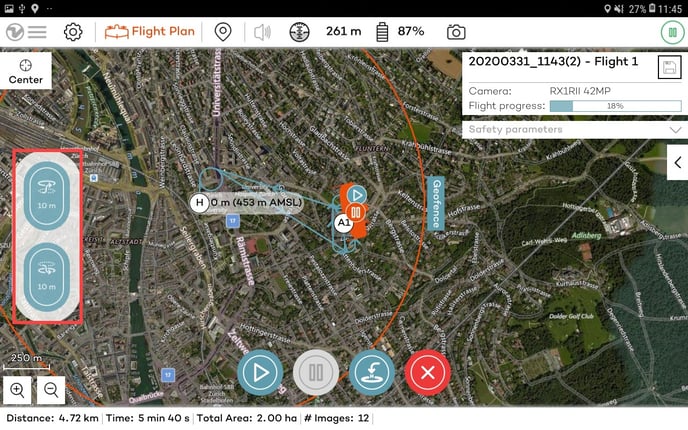
2. Use the height changing buttons on the left side of the tablet to command rising or sinking of WingtraOne by increments of 10 m
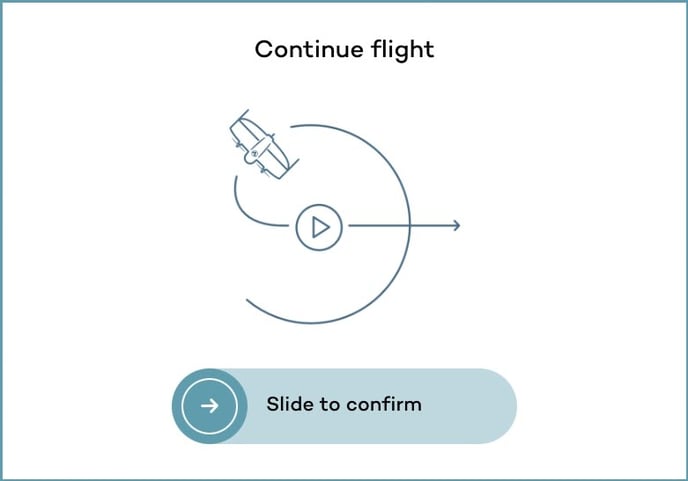
3. Click on the Start (forward arrow) button to continue the flight
4. Slide to confirm (see below), at which point WingtraOne will return to auto mode and continue the planned mission.
In case RTH is triggered by the operator or automatically, WingtraOne will return to the home point. RTH process can be interrupted by clicking on the Start button to resume the mission or by pressing the Pause button to pause.
Resuming a flight is not possible when RTH is triggered due to low battery or due to a failsafe, such as wind speed >12 m/s, sensor failure or battery failure.