Planificación del vuelo
Para que el vuelo sea seguro y al mismo tiempo mantener la captura de datos consistente logrando un GSD uniforme o una densidad de nube de puntos uniforme en vuelos con Lidar, sugerimos usar WingtraCloud y su función de planificación de vuelo 3D. Para más información, por favor revisa aquí.
Para lograr los objetivos mencionados anteriormente, los planes de vuelo deben cumplir con los siguientes criterios::
- Tener el seguimiento del terreno siempre ACTIVADO. Para saber más sobre el seguimiento del terreno, por favor revisa aquí.
- Mantener el RAI (Retorno a Inicio) Seguro siempre ACTIVADO. Para más información sobre los modos RAI, por favor revisa aquí.
- Configurar las líneas de vuelo paralelas a las curvas de nivel del terreno. Para lograrlo, por favor mueve el control deslizante de dirección de vuelo hasta que las líneas estén correctamente orientadas.
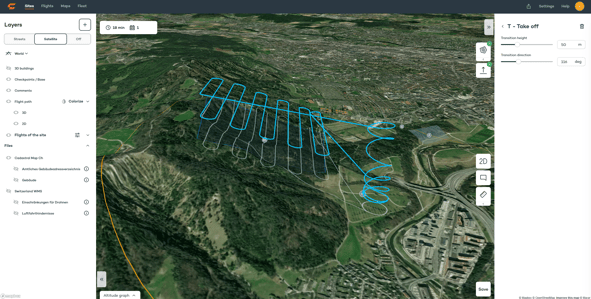
- En caso de que el terreno cambie drásticamente, puedes lograr el criterio anterior dividiendo las áreas en subáreas, donde cada una cubre el terreno con una orientación similar de las curvas de nivel. Para cada área, orienta las líneas de vuelo de forma adecuada.


-
- Los usuarios que hagan planificación de vuelo 2D en WingtraHub o WingtraPilot para tener una mejor vista general del terreno sobre el cual volarán con su WingtraOne, pueden cambiar el tipo de mapa a Terreno si están usando Google como proveedor de mapas en WingtraPilot.

- Los usuarios que hagan planificación de vuelo 2D en WingtraHub o WingtraPilot para tener una mejor vista general del terreno sobre el cual volarán con su WingtraOne, pueden cambiar el tipo de mapa a Terreno si están usando Google como proveedor de mapas en WingtraPilot.
Para que los vuelos de múltiples áreas sean más eficientes, asegúrate de orientar las líneas de vuelo de forma adecuada. Para el ejemplo anterior, esto significaría que el drone vuele A1 de abajo hacia arriba, A2 de arriba hacia abajo y A3 de abajo hacia arriba.
- Aumenta los parámetros de seguridad y la altura de vuelo si es posible, de esta forma la zona de seguridad entre el terreno y el drone será suficiente para compensar las diferencias entre el terreno real y el MDT usado para el seguimiento del terreno.
- Verifica si el vuelo es factible y si el vuelo del drone es lo suficientemente seguro y libre de colisiones. Hazlo moviendo el cursor en el gráfico de altitud y revisando la posición del drone en cualquier momento del vuelo, incluyendo el despegue, la espera, el crucero y el aterrizaje mediante una inspección visual. Realiza la inspección visual de:
- el gráfico de altitud
- la trayectoria de vuelo

- Si es necesario, usa puntos de ruta para aumentar la seguridad del vuelo. Para más información sobre los puntos de ruta, revisa aquí.
Vuelo
Reconocimiento
Una vez en el campo, haz un reconocimiento rápido del área que vas a volar. Asegúrate de que no haya discrepancias entre el terreno real y el modelo de elevación que se ejecuta en segundo plano en el software de planificación de vuelo.
Presta especial atención al recorrido de la aeronave desde el punto de despegue hasta la primera línea de vuelo y si puede volver al punto de origen sin obstáculos desde cualquier punto del área de vuelo. Si notas alguna posible interferencia, es altamente recomendable revisar el plan de vuelo y adaptarlo a la situación real en el campo.
Si no te sentís capacitado para evaluar la configuración en el campo, nuestra recomendación es usar datos de elevación personalizados.
Punto de origen
Elegí el lugar adecuado para colocar el punto de origen: asegurate de que esté libre de obstáculos y que haya suficiente espacio libre para que el drone realice la transición y la espera.
Encontrar un lugar seguro y suficientemente amplio para el despegue y el aterrizaje es esencial para la seguridad de toda la misión, ya que el despegue y el aterrizaje son algunas de las partes más críticas de la misión. Si vas a despegar cerca de una pendiente, asegurate de que la transición esté orientada en dirección opuesta.

Debido a la menor precisión del modelo de terreno en paisajes donde el terreno cambia drásticamente, WingtraPilot podría detectar una diferencia significativa entre la posición del drone y los datos de elevación del terreno utilizados.
Para más información sobre la advertencia y cómo resolverla, por favor consulta el siguiente artículo.
Datos de elevación personalizados
La planificación y el vuelo con WingtraOne dependen de datos de elevación globales que se utilizan como base para el seguimiento del terreno. La resolución de dicho modelo global es de 30 m.
Ten en cuenta que cuanto más empinado es el terreno, mayor es la incertidumbre de los datos. Por lo tanto, se recomienda usar datos de elevación personalizados en caso de que estés mapeando terrenos empinados y que cambian rápidamente. Para más información sobre los datos de elevación personalizados y cómo cargarlos, por favor consulta este artículo.
Contactá con las autoridades locales y verificá la disponibilidad de datos de elevación locales para el área que vas a mapear.
Una de las mejores fuentes para datos de elevación personalizados es el servicio EarthExplorer gestionado por el Servicio Geológico de los Estados Unidos. Consultá este artículo para aprender cómo descargar mosaicos SRTM desde EarthExplorer y configurar los datos para la importación personalizada.