WingtraOne generalmente vuela en modo crucero o en modo estático. El modo estático implica una posición vertical del avión no tripulado para el despegue y el aterrizaje. En modo crucero, el drone se posiciona en forma horizontal para volar hacia adelante, el modo en el que WingtraOne vuela como un avión de ala fija.
Para ejecutar un plan de vuelo completo e incorporar transiciones entre el modo estático y el modo crucero, WingtraOne vuela de acuerdo con los siguientes tres modos de vuelo principales:
Modo de misión
Este es el modo normal en el que WingtraOne vuela la misión planificada de forma autónoma desde el despegue hasta el aterrizaje. Después de comandar el despegue en la tablet, WingtraOne realiza un chequeo de motores, donde ambos motores giran por separado. Después de cuatro segundos, WingtraOne se eleva verticalmente en vuelo estático hasta una altura de transición preestablecida. Mientras asciende, WingtraOne se orienta para asegurarse de que la parte delantera mire en la dirección de la transición.
Después de la transición, WingtraOne vuela hasta el círculo de ascenso/descenso, donde se eleva hasta la altitud de la misión. Después de completar la/s area/s de vuelo prevista/s, WingtraOne vuela de nuevo al círculo de ascenso/descenso para volar hasta la altitud de transición. Después de una transición a modo estático, WingtraOne primero se acomoda horizontalmente hasta la posición de inicio y luego comienza a descender. Antes de iniciar el descenso, el WingtraOne gira su parte trasera (el logotipo de Wingtra) hacia el viento para lograr una mejor respuesta a las ráfagas y un menor ángulo de inclinación para el aterrizaje. El WingtraOne desciende horizontalmente a una velocidad de 1,5 - 2 m/s, dependiendo de la velocidad del viento. Cuando la velocidad del viento es inferior a 5 m/s la velocidad de descenso es de 2 m/s, mientras que cuando es superior a 5 m/s la velocidad de descenso es de 1,5 m/s. Cuando está a 3.5 m (11.5 pies) sobre el suelo, el WingtraOne reduce aún más su velocidad y aterriza automáticamente al apagar los motores ligeramente por encima del suelo.
Sus opciones de interacción
Cuando los controles in-app están activados, todas las acciones posibles para interactuar con el dron se realizan desde la tablet presionando los botones resaltados.
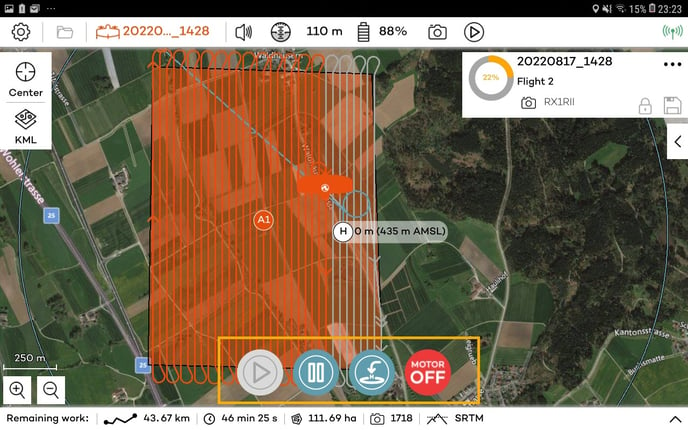
La siguiente tabla describe las acciones de cada botón llevándolas de izquierda a derecha.
| Comenzar o continuar vuelo | Iniciar o continuar el vuelo Iniciar el vuelo o continuar después de la pausa o manualmente se activa la RTH. |
| Pausa y espera | Pausa el vuelo en crucero y pone el WingtraOne en un círculo de espera. |
| Retorno a Inicio | El drone vuela de vuelta de forma autónoma, realiza el procedimiento de aterrizaje previsto y aterriza. |
| Parada de Emergencia | Apaga los motores y cae en espiral sin control |
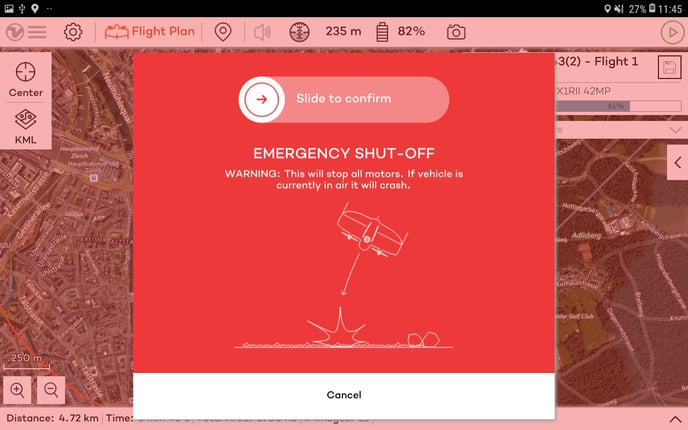
Apagado de Emergencia
El apagado de emergencia es un método de último recurso utilizado sólo en situaciones críticas, porque una vez activado no hay vuelta atrás. El WingtraOne cortará la energía de ambos motores y moverá uno de los alerones en ángulo pronunciado. Esto causará un rápido descenso con una espiral cerrada, que hará que el drone aterrice estrellándose. Hay una alta probabilidad de que no se pueda recuperar nada del drone después de un apagado de emergencia. Hay algunas situaciones extremas en las que se puede recurrir al uso del apagado de emergencia para minimizar el riesgo, como las siguientes:
- Evitar que algún motor se queme en caso de que se vuelque al suelo
- Una falla de un solo motor o que parte del ala este dañada. Detener el motor restante asegurará que el WingtraOne no se desvíe en una dirección no deseada.
- Una aeronave tripulada se aproxima al WingtraOne a una velocidad muy alta. Detener el motor evitará que el WingtraOne se estrelle contra la aeronave tripulada y evitará cualquier lesión.
- El WingtraOne está muy cerca de estrellarse contra un edificio debido a un error de planificación o a un fallo del equipo. Detener el motor evitará que el WingtraOne se estrelle contra el edificio con los motores girando y reducirá el riesgo de lesiones.
¡NO HAY FORMA DE RECUPERAR CONTROL DESPUÉS DE INICIADO EL APAGADO DE EMERGENCIA!
El apagado de emergencia se activa desde la tablet
Return-a-Inicio (RAI)
Si el RAI está activado, WingtraOne vuela de vuelta al punto de origen y aterriza de forma autónoma. Para más detalles, ver el capítulo de Regreso al Inicio.
Pausa y reanudar
Los usuarios que no usen el control remoto, pueden pausar la misión en el modo crucero enviando a WingtraOne a un círculo de espera. Algunos ejemplos de situaciones donde debería considerarse son:
- Un helicóptero u otro avión no tripulado puede entrar en el espacio aéreo
- Los pájaros podrían estar volando demasiado cerca
- No está seguro de que el vuelo completo haya sido planeado de forma segura y quiere revisarlo mientras está en marcha.
La recopilación de datos (la misión) puede reanudarse después de la Pausa o RAI. Para más detalles, vea el artículo de Pausa y Reanudar.