Obstacle avoidance explained in simple terms
WingtraRAY obstacle avoidance is an additional safety layer for your drone operations. A forward-facing radar sensor mounted in the WingtraRAY nose cone can detect static objects like buildings, cranes or terrain in cruise and trigger an avoidance and return-to-home maneuver.
Important: This features does not guarantee detection or avoidance. You are responsible for planning flights that are free from obstacles. Collisions are not covered under warranty.
Is it 100% reliable? Can I try out the feature against obstacles?
No. Obstacle avoidance is an additional layer of safety that can prevent an incident, but many objects will not be detected in all situations. You are responsible for planning flights that are free from obstacles. Collisions are not covered under warranty. Review also this article for best practices on flight planning.
- Buildings, cranes, towers and rock faces / bare earth have a good visibility to the obstacle avoidance system and will likely be detected/avoided. In certain conditions (for example a combination of certain wind conditions and unfavorable object location, e.g. in turns), the system can still fail.
- Vegetation and wires (transmission lines, telco tower stabilizers, etc) have low visibility to the obstacle avoidance system and will likely not be detected/avoided.
The feature will be improved over time and the likelihood of detection for all types of objects and situations increase. You can help us improve by opting in to the beta program (see below).
When does the feature become available? Is there a beta?
Collision avoidance beta mode is available now. Only users who opt-in proactively will benefit from this feature while in beta.
Want to try obstacle avoidance?
Obstacle avoidance is currently in beta stage – you can opt-in to the program by writing an email to juhani.mercuriali@wingtra.com.
What happens if you opt-in:
- You get immediate access to this additional safety feature
- You help us ensure that the feature is ready for the full customer fleet
- As this is a beta version, you can expect a small risk of a false detection, leading the drone to return to home unexpectedly
- Limitations: In the current beta version, OA is only active if you have selected direct RTH
What detection technology does WingtraRAY use?
WingtraRAY uses a radar-based sensing system mounted in the nose cone of the drone. It includes both an emitter and a receiver and works by bouncing electromagnetic waves off objects to detect them, which allows for long-range detection and reliable performance. Our radar sensor also measures the relative speed of obstacles—helping improve decision-making in real time.
Are obstacles avoided in hover and cruise?
Obstacle avoidance is only active during cruise flight (forward-facing).
The radar sensor is mounted in the tip of the nose cone. This means it faces forward during cruise and upward during hover—so it can't detect obstacles when hovering.
What types of obstacles are detected and at what distance?
The system is tuned for static obstacles like buildings, terrain, and metal structures. Detection likelihood depends on the object's size, density, and reflectivity. An object is detected from 100 meters giving the system time to think and decide whether it should be avoided or whether the flight can be continued.
Note: Detection is not guaranteed. You are responsible for safe flight planning. Collisions are not covered under warranty.
Sensor specifications
-
Detection points: 10 simultaneous beams
-
Update rate: 30 Hz
-
Max range: 100 m
-
Angular resolution: 30°
(This is the angle between two objects needed for them to be seen as separate)
What happens after an obstacle is avoided?
After an avoidance maneuver, the drone performs a return-to-home (RTH).
If another obstacle appears on the RTH path, the drone will try to avoid it again. If no safe path is found, it will land on the spot as a last resort.
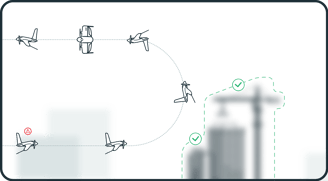
What does the maneuver look like?
The exact maneuver is still in development. It will likely be a version of an Immelmann maneuver (a half-loop followed by a half-roll). This allows the drone to stay close to its original flight path, while only gaining slight altitude.
What is the airspace incursion of the avoidance maneuver?
⚠️ Important: This maneuver is still being tuned. Values may change.
In calm conditions (no wind), the drone:
-
Moves about 15 m horizontally in flight direction to slow down
-
Climbs 30 m vertically to clear the obstacle
How does wind impact the maneuver?
The avoidance maneuver is aggressive and fast—there’s no position control during the climb. This means that:
-
The drone can drift in the direction of the wind
-
Stronger winds increase drift
What should I do after a landing?
After the drone lands, replan your mission and fly again.
Will it avoid…
- an unexpected crane on a construction site? Very probably yes, a crane is highly detectable and can be avoided in time
- a power mast that I forgot to account for during planning? Very probably yes, a power mast is among the easily detected obstacles
- a cliff that is not modeled well by the WingtraApp terrain data? Probably yes, if the plane flies towards it and not parallel to it, it should be detected on time. Vegetation on the cliff may impact the detection.
- a bird strike? No. Birds move too fast, often from above, and are not tracked by the radar.
- a power line? A thick power line has a moderate to low chance of being avoided. Due to the smaller size, the probability of detection is lower than for a building or a power mast.
- a tree after landing loiter? No. Thin trees are hard to detect, and during loiter the view keeps changing. Obstacle avoidance would not prevent a collision.
- terrain in a loiter circle? No. Terrain would only be visible once the drone enters the loiter circle. The sensor wouldn’t have enough time or space to react.
Will a maneuver trigger if I fly 5 m above a building?
Likely, yes. Here’s why:
- At 90 m distance, the detection uncertainty is around 20 m
- As the drone gets closer, this drops to 10 m
- If your flight path is within 10 m of the building, the system will trigger a maneuver
Tip: Always plan with a clear safety margin from buildings or tall objects.
Can it be disabled?
Yes. You will have the option to turn off obstacle avoidance if needed.
How does the feature work? Visual explanation
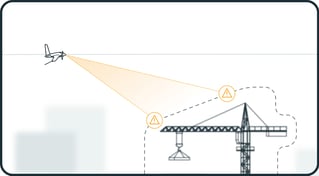
No obstacle on the path
From a far, an object looks as if it could be in the way, but with high uncertainty. As we get closer, the uncertainty decreases and it becomes clear that there is no risk of collision and the mission continues:
 .
. 

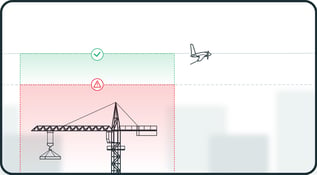
Obstacle on the path
From far, again, detection starts with low certainty. As the drone approaches, the likelihood of colliding increases. If the system predicts a high likelihood of collision, it triggers the avoidance maneuver.
 .
. 
This logic helps avoid false alarms, while still reacting in time when needed.
Is a dent in a nose cone affecting detection?
A small dent in the nose cone is not affecting detection. However, larger impact may result in a displaced radar, which can affect detecting obstacles in the desired direction. In this case, contact Customer Success to assess if a nose cone exchange is necessary.
Can the nose cone be exchanged?
Yes, it is not needed to pair a drone with a nose cone.
Is Obstacle Avoidance available in all countries?
No, certain countries have radar restrictions. Currently, we know that the following countries are excluded:
- Brazil
- Thailand